ROS勉強記録
趣味でROSというロボット用ミドルウェア(Robot Operating System)を勉強した記録です。ROSを使ってロボットに知能を吹き込みます。
2010年5月29日土曜日
ルンバ自律移動途中経過
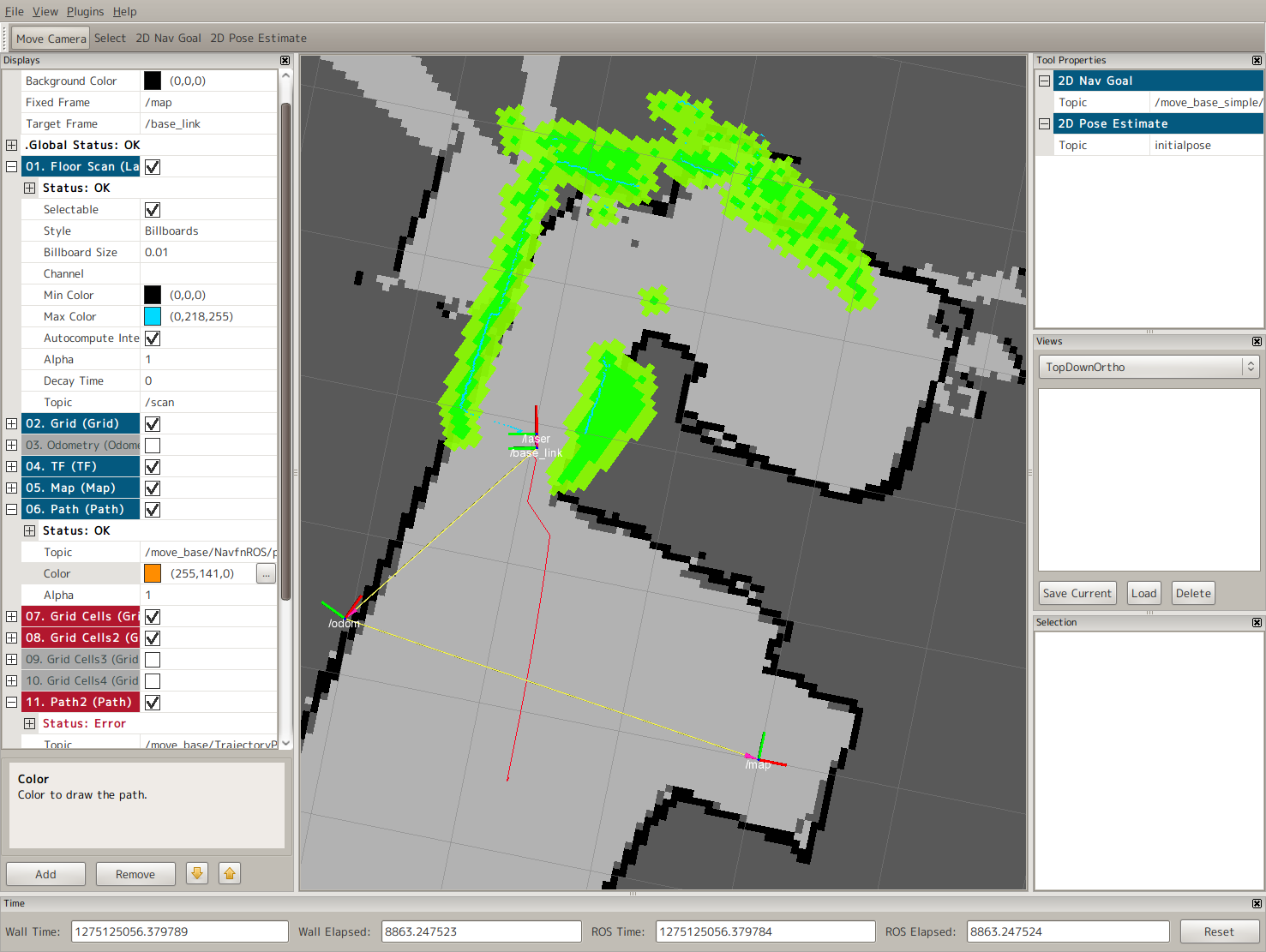
rvizの使い方もだんだん分かってきました。
なんとかルンバが動き始めました。
速度をはやくすると位置がずれまくります。
もう少しパラメータを調整する必要がありそうです。
0 件のコメント:
コメントを投稿
次の投稿
前の投稿
ホーム
登録:
コメントの投稿 (Atom)
0 件のコメント:
コメントを投稿