今回はシミュレータに自分で定義した物体を入れます。
とりあえずgazeboを起動しましょう。
念のためmakeから。
$ rosmake gazebo
$ roslaunch gazebo empty_world.launch
で、次に以下を適当な場所にobject.urdf
として保存します。
<robot name="simple_box">
<joint name="my_box_joint" type="revolute" >
<!-- axis is in the parent link frame coordintates -->
<axis xyz="0 1 0" />
<parent link="world" />
<child link="my_box" />
<!-- initial pose of my_box joint/link in the parent frame coordiantes -->
<origin xyz="0 0 2" rpy="0 0 0" />
</joint>
<link name="my_box">
<inertial>
<mass value="1.0" />
<!-- center of mass (com) is defined w.r.t. link local coordinate system -->
<origin xyz="1 0 0" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="100.0" iyz="0.0" izz="1.0" />
</inertial>
<visual>
<!-- visual origin is defined w.r.t. link local coordinate system -->
<origin xyz="1 0 0" rpy="0 0 0" />
<geometry name="my_box_visual_geom">
<box size="0.05 0.05 0.10" />
</geometry>
</visual>
<collision>
<!-- collision origin is defined w.r.t. link local coordinate system -->
<origin xyz="1 0 0" rpy="0 0 0 " />
<geometry name="my_box_collision_geom">
<box size="0.05 0.05 0.10" />
</geometry>
</collision>
</link>
<gazebo reference="my_box">
<material>Gazebo/Blue</material>
<turnGravityOff>false</turnGravityOff>
</gazebo>
</robot>中身は、
- <joint>ジョイントの定義(ワールド座標と次に定義するリンクとの仮想フリージョイント)
- <link>リンクの定義
- <inertial>剛体定義
- <visual>見え方定義
- <collision>衝突定義
- <gazebo>シミュレータ設定
となっています。
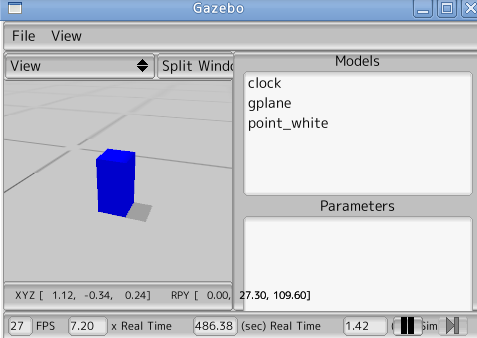
ではこれをシミュレータの中に生成してみます。
$ rosrun gazebo_tools gazebo_model -f `pwd`/object.urdf -z 1 spawn my_object
-zはモデルの初期Z座標です。
[ERROR] 1265003610.139332000: Joint 'my_box_joint' is of type REVOLUTE but it does not specify limits
[ERROR] 1265003610.139507000: joint xml is not initialized correctly
[ERROR] 1265003610.139564000: Unable to load robot model from param server robot_description
私の環境では以上のようにエラーがでてしまいました。
仮想関節のタイプをrevoluteにするときは、限界角度を指定しないといけないみたいです。
そこで、
$ roscd gazebo_worlds
$ less objects/mug-test.urdf
を見てみると、
<joint name="my_mug_joint" type="floating" >
となっていますので、
typeをfloatingにしてもう一度ためしてみます。
今度は成功しました。
ただし、
[ WARN] 1265003926.244514000: URDF root link "world" is deprecated, please remove joint to world link from your URDF
という表示がでました。
たしかに、初期位置は最初のジョイントのoriginをいじっても変更できません。
なので、苦労したfloatingジョイントですが削除しちゃいましょう。
では関節を増やしてみましょう。
<robot name="simple_box">
<joint name="my_box_joint1" type="revolute" >
<limit lower="-1" upper="1" effort="1" velocity="1" />
<axis xyz="0 1 0"/>
<parent link="my_box" />
<child link="my_box2" />
<origin xyz="0 0 0.06" rpy="0 0 0" />
</joint>
<joint name="my_box_joint2" type="revolute" >
<limit lower="-1" upper="1" effort="1" velocity="1" />
<axis xyz="0 1 0"/>
<parent link="my_box2" />
<child link="my_box3" />
<origin xyz="0 0 0.12" rpy="0 0 0" />
</joint>
<link name="my_box">
<inertial>
<mass value="3.0" />
<!-- center of mass (com) is defined w.r.t. link local coordinate system -->
<origin xyz="0 0 0" />
<inertia ixx="3.0" ixy="0.0" ixz="0.0" iyy="3.0" iyz="0.0" izz="3.0" />
</inertial>
<visual>
<!-- visual origin is defined w.r.t. link local coordinate system -->
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry name="my_box_visual_geom">
<box size="0.1 0.10 0.10" />
</geometry>
</visual>
<collision>
<!-- collision origin is defined w.r.t. link local coordinate system -->
<origin xyz="0 0 0" rpy="0 0 0 " />
<geometry name="my_box_collision_geom">
<box size="0.1 0.10 0.10" />
</geometry>
</collision>
</link>
<link name="my_box2">
<inertial>
<mass value="1.0" />
<!-- center of mass (com) is defined w.r.t. link local coordinate system -->
<origin xyz="0 0 0.05" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="100.0" iyz="0.0" izz="1.0" />
</inertial>
<visual>
<!-- visual origin is defined w.r.t. link local coordinate system -->
<origin xyz="0 0 0.05" rpy="0 0 0" />
<geometry name="my_box_visual_geom2">
<box size="0.05 0.05 0.10" />
</geometry>
</visual>
<collision>
<!-- collision origin is defined w.r.t. link local coordinate system -->
<origin xyz="0 0 0.05" rpy="0 0 0 " />
<geometry name="my_box_collision_geom2">
<box size="0.05 0.05 0.10" />
</geometry>
</collision>
</link>
<link name="my_box3">
<inertial>
<mass value="1.0" />
<!-- center of mass (com) is defined w.r.t. link local coordinate system -->
<origin xyz="0 0 0.05" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="100.0" iyz="0.0" izz="1.0" />
</inertial>
<visual>
<!-- visual origin is defined w.r.t. link local coordinate system -->
<origin xyz="0 0 0.05" rpy="0 0 0" />
<geometry name="my_box_visual_geom2">
<box size="0.05 0.05 0.10" />
</geometry>
</visual>
<collision>
<!-- collision origin is defined w.r.t. link local coordinate system -->
<origin xyz="0 0 0.05" rpy="0 0 0 " />
<geometry name="my_box_collision_geom2">
<box size="0.05 0.05 0.10" />
</geometry>
</collision>
</link>
<gazebo reference="my_box">
<material>Gazebo/Blue</material>
<turnGravityOff>false</turnGravityOff>
</gazebo>
<gazebo reference="my_box2">
<material>Gazebo/Red</material>
<turnGravityOff>false</turnGravityOff>
</gazebo>
<gazebo reference="my_box3">
<material>Gazebo/Green</material>
<turnGravityOff>false</turnGravityOff>
</gazebo>
</robot>
Gazeboシミュレータのメニューで
View -> Show Joints
にチェックをいれておくと、ジョイント構造がみれてデバッグしやすいです。
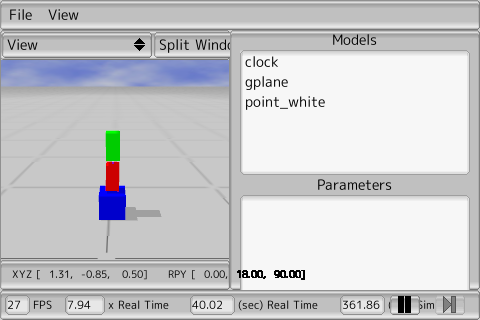
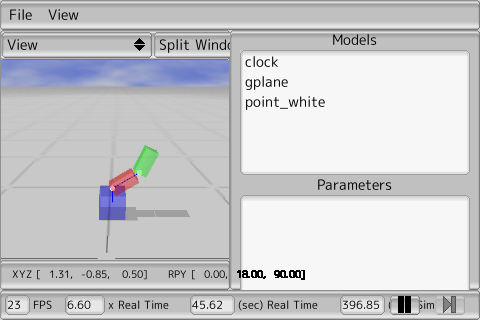
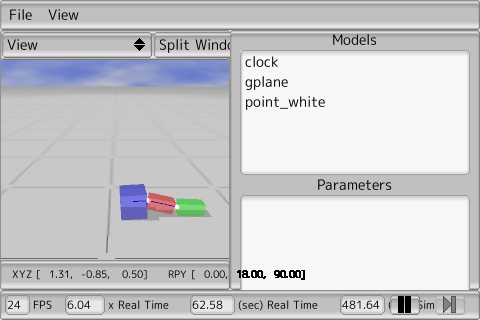
フリージョイントなんで、ふにゃー、っていう感じで倒れていきます。
ちょっとイナーシャの設定があやしいですが、今回はこれくらいにして、
次回コントローラーを作りましょう。
次回コントローラーを作りましょう。
0 件のコメント:
コメントを投稿