インストール
$ rosdep install cob3_gazebo cob3_arm
$ rosmake cob3_gazebo cob3_arm
動かす
$ roscd cob3_gazebo/ros/launch
$ roslaunch cob3_arm.launch
えー!
アームだけっすか。ビビった。
やはりJointSplineTrajectoryControllerを使って動かすみたいです。
$ rosrun cob3_arm simple_trajectory.py
とするとぐにゃぐにゃと動きます。
cob3_arm/ros/src/simple_trajectory.py
に軌道がかかれているので、これを変更すれば自由にアームを動かせますね。
次にGUIを使って操作する方法もあるのでこれを紹介します。
インストール
$ rosdep install cob3_dashboard
$ rosmake cob3_dashboard
実行
$ rosrun cob3_dashboard knoeppkes.py
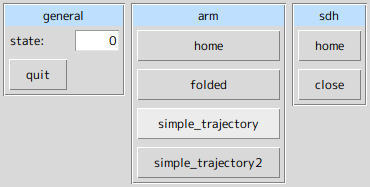
ボタンを押すと動きますがあまり実用的ではなさそうです。
自分で軌道作って登録する感じでしょうか?
今日はここまで。
アームと台車が連動して動くかと思っていたのでちょっと残念ですね。
がんばればすぐできると思いますが。。。
0 件のコメント:
コメントを投稿