やったのは前回のi-SOBOTの時と同じでPS3コントローラとつないだだけ、なんですけど。
これでROSがRoombaにのりました
(正確にはPCから操作しているだけですが、そのPCもRoombaに乗っているのでよしとしましょう)。
ノードの関係は↓のようになっています。
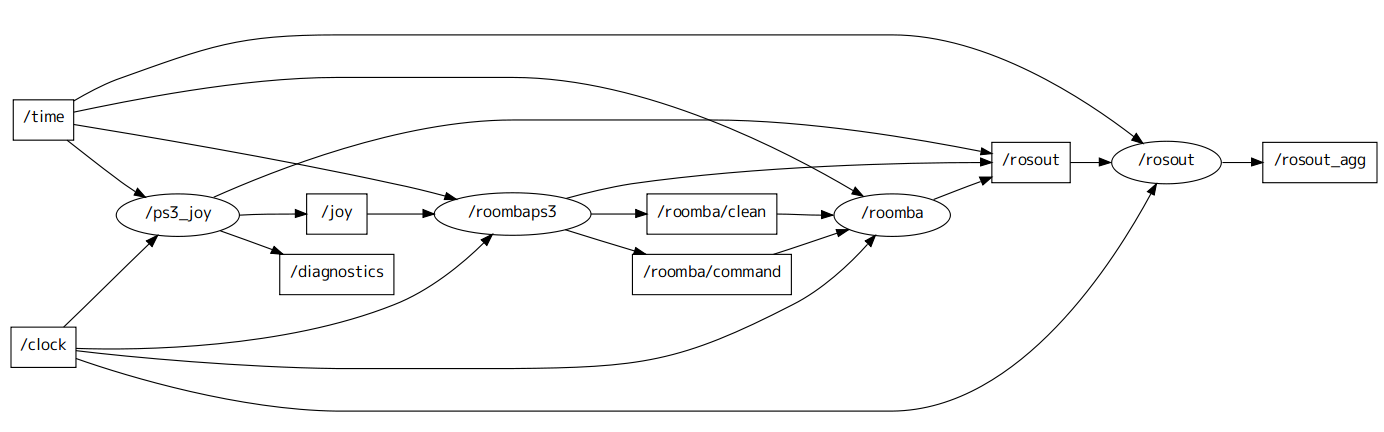
roombaノードがルンバへの指令を受け付けます。
ps3_joyからの指令をroombaps3ノードが仲介して
roombaノードに渡しています。
roombaノードが実際にルンバを動かします。
万が一ソースを見たい人がいれば↓をどうぞ。
http://code.google.com/p/otl-ros-pkg/
0 件のコメント:
コメントを投稿