$ roscd learning_actionlib
して、
src/fibonacci_client.cppとして以下を保存します。
#include <ros/ros.h>
#include <actionlib/client/simple_action_client.h>
#include <actionlib/client/terminal_state.h>
#include <learning_actionlib/FibonacciAction.h>
int main (int argc, char **argv)
{
ros::init(argc, argv, "test_fibonacci");
// create the action client
// true causes the client to spin it's own thread
actionlib::SimpleActionClient<learning_actionlib::FibonacciAction> ac("fibonacci", true);
ROS_INFO("Waiting for action server to start.");
// wait for the action server to start
ac.waitForServer(); //will wait for infinite time
ROS_INFO("Action server started, sending goal.");
// send a goal to the action
learning_actionlib::FibonacciGoal goal;
goal.order = 20;
ac.sendGoal(goal);
//wait for the action to return
bool finished_before_timeout = ac.waitForResult(ros::Duration(30.0));
if (finished_before_timeout)
{
actionlib::SimpleClientGoalState state = ac.getState();
ROS_INFO("Action finished: %s",state.toString().c_str());
}
else
ROS_INFO("Action did not finish before the time out.");
//exit
return 0;
}
クライアントは使うだけなので短いですね。
では中身を見ていきます。
3行目は中では使ってなさそうですけど、では中身を見ていきます。
#include <ros/ros.h>
#include <actionlib/client/simple_action_client.h>
#include <actionlib/client/terminal_state.h>チュートリアルには"defines the possible goal states"とあります。
中身を見ると定数定義っぽいです。
enum StateEnum
{
RECALLED,
REJECTED,
PREEMPTED,
ABORTED,
SUCCEEDED,
LOST
} ;
辺りでしょうか。
#include <learning_actionlib/FibonacciAction.h>これはサーバと同じですね。
actionをやりとりするメッセージです。
actionlib::SimpleActionClient<learning_actionlib::FibonacciAction> ac("fibonacci", true); これでクライアントをFibonacciAction型で作ります。1つ目は接続先のサーバの名前、2つ目は
自動でスレッドでros::spin()をやらせるかどうかです。trueになっているので、ros::spin()の必要はないです。しかし、クライアントなのになぜspin()が必要なんでしょうか?よく分かりません。
ROS_INFO("Waiting for action server to start.");
// wait for the action server to start
ac.waitForServer(); //will wait for infinite timeこれはサーバの応答待ち。引数にタイムアウトを入れられます。
省略すると無限に待ちます。
ROS_INFO("Action server started, sending goal.");
// send a goal to the action
learning_actionlib::FibonacciGoal goal;
goal.order = 20;
ac.sendGoal(goal);ゴールのorder(繰り返し回数)に20を指定してセットしています。
sendGoalで送信されます。
//wait for the action to return
bool finished_before_timeout = ac.waitForResult(ros::Duration(30.0));タイムアウト30秒で結果を待ちます。
if (finished_before_timeout)
{
actionlib::SimpleClientGoalState state = ac.getState();
ROS_INFO("Action finished: %s",state.toString().c_str());
}
else
ROS_INFO("Action did not finish before the time out.");
//exit
return 0;
}resultはこのstateに入っているのでしょうか?
ではいつものようにビルドしましょう。
rosbuild_add_executable(fibonacci_client src/fibonacci_client.cpp)
を足して、
makeです。
$ rxgraph -t
すると、
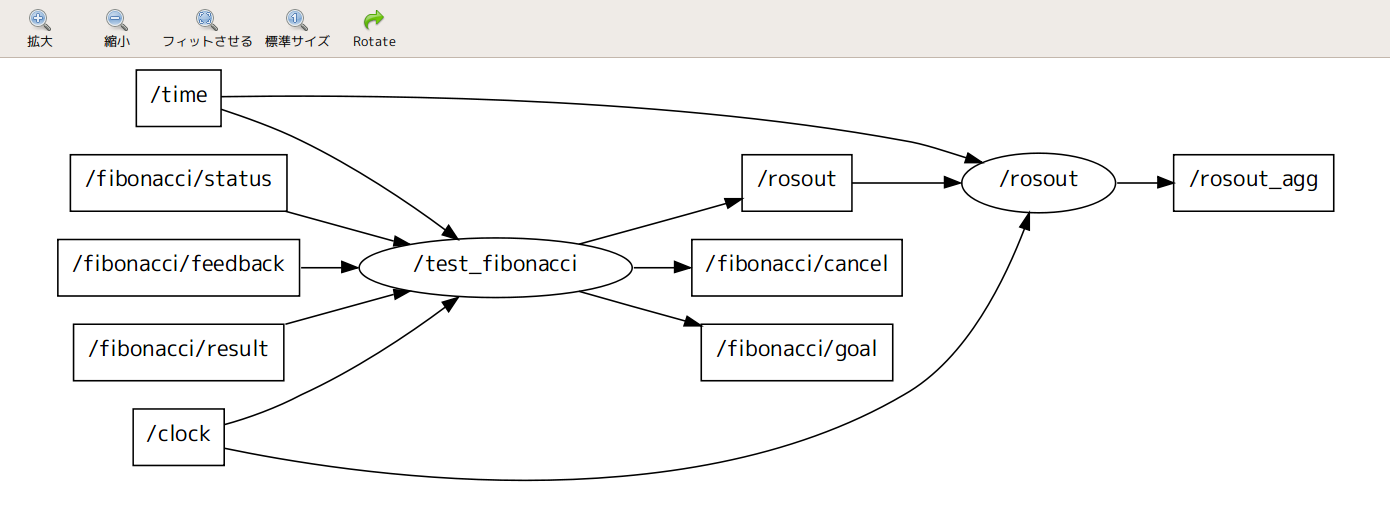
です。
ではサーバとつないでみましょう。
$ roscore
$ rosrun learning_actionlib fibonacci_server
$ rosrun learning_actionlib fibonacci_client
するとしばらくまつと
clientのターミナルに
[ INFO] 1262265014.097766000: Waiting for action server to start.
[ INFO] 1262265015.153827000: Action server started, sending goal.
[ INFO] 1262265035.156137000: Action finished: SUCCEEDED
とでました。
$ rostopic echo /fibonacci/feedback
してから、クライアントを立ち上げると
header:
seq: 19
stamp: 1262265148042176000
frame_id:
status:
goal_id:
stamp: 1262265130041426000
id: /test_fibonacci-1-1262265130.41426000
status: 1
text: This goal has been accepted by the simple action server
feedback:
sequence: (0, 1, 1, 2, 3, 5, 8, 13, 21, 34, 55, 89, 144, 233, 377, 610, 987, 1597, 2584, 4181, 6765)
---
header:
seq: 20
stamp: 1262265149042190000
frame_id:
status:
goal_id:
stamp: 1262265130041426000
id: /test_fibonacci-1-1262265130.41426000
status: 1
text: This goal has been accepted by the simple action server
feedback:
sequence: (0, 1, 1, 2, 3, 5, 8, 13, 21, 34, 55, 89, 144, 233, 377, 610, 987, 1597, 2584, 4181, 6765, 10946)
という感じで計算途中の様子がみれます。
一方で、
$ rostopic echo /fibonacci/result
とすると、最後に
---
header:
seq: 2
stamp: 1262265262841868000
frame_id:
status:
goal_id:
stamp: 1262265242840719000
id: /test_fibonacci-1-1262265242.840719000
status: 3
text:
result:
sequence: (0, 1, 1, 2, 3, 5, 8, 13, 21, 34, 55, 89, 144, 233, 377, 610, 987, 1597, 2584, 4181, 6765, 10946)
とだけ表示されます。
$ rxgraph -t
として見てみると以下のようになっています。
今回はcancelは使いませんでしたね。
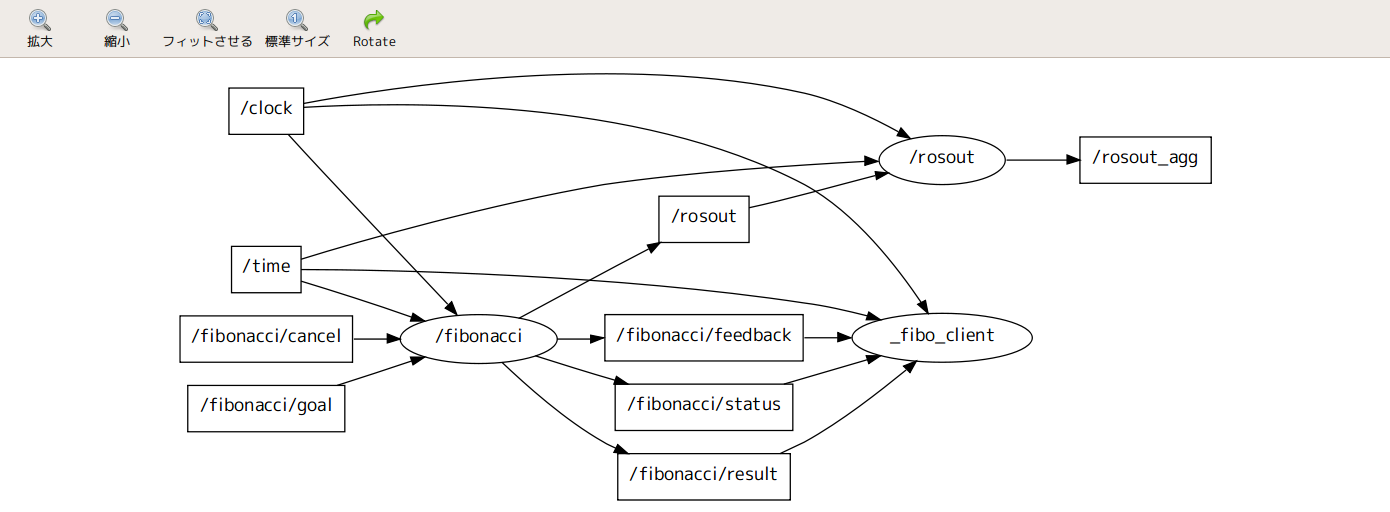
という感じです。
今年はこれくらいでおしまいです。
0 件のコメント:
コメントを投稿