フレームを追加する(C++)
http://www.ros.org/wiki/tf/Tutorials/Adding%20a%20frame%20(C%2B%2B)
ローカル座標系の連結がテーマです。
この重要性はロボティクスを勉強した人なら分かりますね。
tfがやりたいのはまさに今回やるテーマだと思います。
例として、レーザーレンジファインダの取り付け位置の話がでています。
レーザー位置はロボットが動くと自動的についてきます。
レーザーレンジファインダが返す、レーザーレンジファインダからの相対位置での障害物位置を、ロボット座標系に変換する、なんてことはやりそうですよね。
tfを使えばそういう変換が楽勝にできます。
tfではツリー構造を作ります。親1つ、子多数の関係です。
循環構造は作れません。
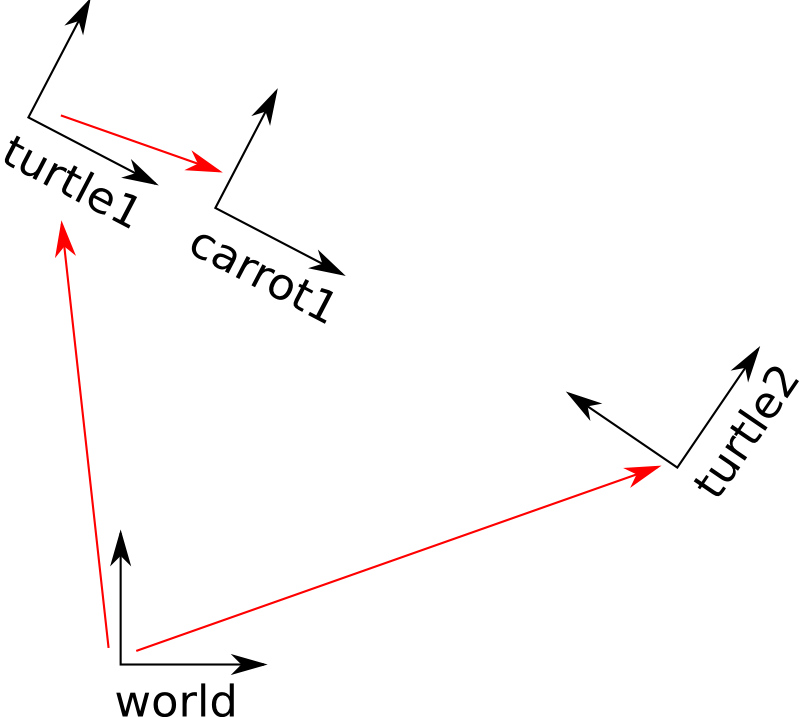
今回作るツリー構造は以下の図です。
turtle1の子としてcarrot1を作ります。
今まで作った/turtle1, /turtle2(引数で指定した)は/worldの子でしたね。
ではいつものように始めます。
$ roscd learning_tf
していつものところへ。そして以下をsrc/frame_tf_broadcaster.cppとして保存しましょう。
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv){
ros::init(argc, argv, "my_tf_broadcaster");
ros::NodeHandle node;
tf::TransformBroadcaster br;
tf::Transform transform;
ros::Rate rate(10.0);
while (node.ok()){
transform.setOrigin( tf::Vector3(0.0, 2.0, 0.0) );
transform.setRotation( tf::Quaternion(0, 0, 0) );
br.sendTransform(transform, ros::Time::now(), "carrot1", "turtle1");
rate.sleep();
}
return 0;
};以前作ったbroadcasterと似たコードが並んでいますね。
違うのはコールバックでないこと、と以下が違います。
br.sendTransform(transform, ros::Time::now(), "carrot1", "turtle1");
最後のsendTransformで、turtle1を親にして、carrot1という名前で新しいフレームを作っています。しかし、この引数をとるsendTransformはdepricatedなので、以下のように書き換えたほうがいいですね。
br.sendTransform(tf::StanpedTransform(transform, ros::Time::now(), "turtle1", "carrot1");その上のところはオフセットです。turtle1からY方向に2.0だけオフセットした位置にcarrot1を作っています。ところで、亀なのにcarrotを追いかけるってどうなの・・・。
transform.setOrigin( tf::Vector3(0.0, 2.0, 0.0) );
transform.setRotation( tf::Quaternion(0, 0, 0) );
ではいつものようにビルドしてください。
CMakeLists.txtに以下を追加。
rosbuild_add_executable(frame_tf_broadcaster src/frame_tf_broadcaster.cpp)
そして、
$ make
です。
そしてlaunchファイルも追加しましょう。
です。普通に起動するだけですね。
<launch>
...
<node pkg="learning_tf" type="frame_tf_broadcaster"
name="broadcaster_frame" />
</launch>です。普通に起動するだけですね。
で、普通に起動します。
$ roslaunch learning_tf start_demo.launch
あれ?前回と何も変わりません。
じゃあ、前回作ったsrc/turtle_tf_listener.cppを編集して、carrotを追いかけるようにしましょう。/turtle1を/carrot1に置き換えるだけです。
listener.lookupTransform("/turtle2", "/carrot1",
ros::Time(0), transform);で、make
して、launchしましょう。
しっかり亀の左によりそう、いい亀になりましたね。
最後におまけで、動くフレームを作っててみましょう。
src/frame_tf_broadcaster.cppを以下のように変更します。
transform.setOrigin( tf::Vector3(2.0*sin(ros::Time::now().toSec()), 2.0*cos(ros::Time::now().toSec()), 0.0) );
transform.setRotation( tf::Quaternion(0, 0, 0) );
亀のまわりをぐるぐる回る亀ができましたとさ。
今回はこれでおしまいです。
0 件のコメント:
コメントを投稿