突然ですが、RTミドルウェアコンテストに参加することにしました。
ただし、ミドルウェアはまじめに書いたこと無いので協賛のほうです。(こんなんで審査していいんだろうか)
http://www.openrtm.org/rt/RTMcontest/2011/award.html
勢いでつい本名で出してしまいました。
一応このブログに関係あるっぽくしようと思って、「グローバルスタンダード賞」としました。
ROSに負けない、国際的に認められそうなモジュールがあるといいなぁ。
2011年11月19日土曜日
2011年8月16日火曜日
OpenRTM-asit ROSパッチ(ros port)を使ってルンバを操縦する
前回OpenRTM-aistからROSを使えるようにしました。
次はお決まりですがルンバを動かします。
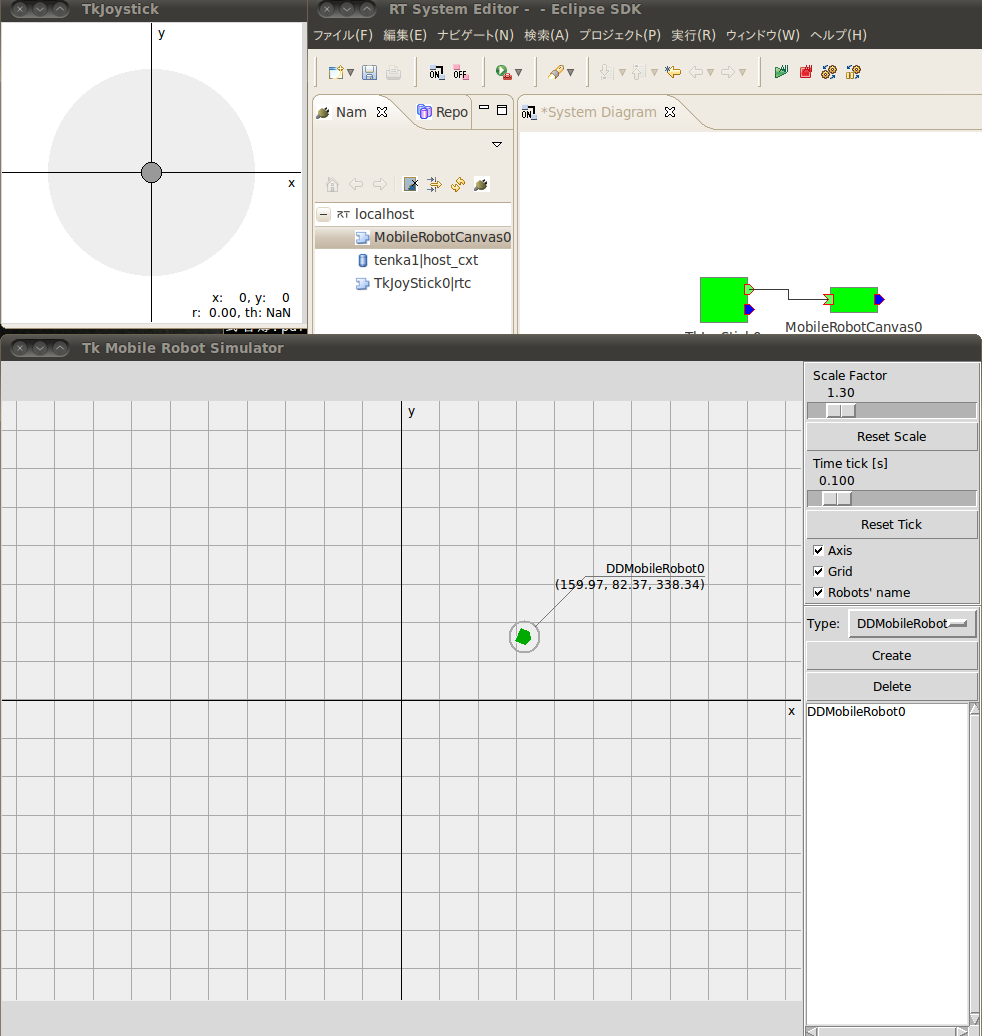
今回はOpenRTM-aistの仮想ジョイスティックコンポーネントを利用してルンバを動かします。
構成としては
TkJoyStick(RTC) -> JoyRTM2velROS(今回作ったコンポーネント)(RTC/ROS) -> いつもの自作ルンバノード(ROS)
という感じです。
TkJoyStickはOpenRTM-aistのサンプルに入っていて、ジョイスティックっぽいGUIです。
面倒なのでビデオ解説です。
JoyRTM2velROSのソースはTkJoyStickからの入力(TimedFloatSeq)をROSのgeometry_msgs/Twist型に変換しているだけです。
やはりOpenRTMとROSは非常に似ていますね。
OpenRTM-aistのコードの自動生成は便利だけど修正がめんどくさいです。
とくにRosPortのように標準ツールでサポートされていないと大変です。
なにかいい方法があれば教えてください。
参考程度にcppのソースファイルだけ貼りつけておきます。
いつも通り適当です。
一応リポジトリに
otl-ros-pkg/otl_nav/JoyRTM2velROS
としておいておきました。
【参考サイト】
http://code.google.com/p/rtm-ros-robotics/wiki/rosport_Example
http://code.google.com/p/rtm-ros-robotics/wiki/RTM_HelloWorldSample
ヘッダファイル
実体(.cpp)
次はお決まりですがルンバを動かします。
今回はOpenRTM-aistの仮想ジョイスティックコンポーネントを利用してルンバを動かします。
構成としては
TkJoyStick(RTC) -> JoyRTM2velROS(今回作ったコンポーネント)(RTC/ROS) -> いつもの自作ルンバノード(ROS)
という感じです。
TkJoyStickはOpenRTM-aistのサンプルに入っていて、ジョイスティックっぽいGUIです。
面倒なのでビデオ解説です。
JoyRTM2velROSのソースはTkJoyStickからの入力(TimedFloatSeq)をROSのgeometry_msgs/Twist型に変換しているだけです。
やはりOpenRTMとROSは非常に似ていますね。
OpenRTM-aistのコードの自動生成は便利だけど修正がめんどくさいです。
とくにRosPortのように標準ツールでサポートされていないと大変です。
なにかいい方法があれば教えてください。
参考程度にcppのソースファイルだけ貼りつけておきます。
いつも通り適当です。
一応リポジトリに
otl-ros-pkg/otl_nav/JoyRTM2velROS
としておいておきました。
【参考サイト】
http://code.google.com/p/rtm-ros-robotics/wiki/rosport_Example
http://code.google.com/p/rtm-ros-robotics/wiki/RTM_HelloWorldSample
ヘッダファイル
// -*- C++ -*-
/*!
* @file JoyRTM2velROS.h
* @brief convert Joystick sample port to ROS twist msg
* @date $Date$
*
* $Id$
*/
#ifndef JOYRTM2VELROS_H
#define JOYRTM2VELROS_H
#include <rtm/Manager.h>
#include <rtm/DataFlowComponentBase.h>
#include <rtm/CorbaPort.h>
#include <rtm/DataInPort.h>
#include <rtm/DataOutPort.h>
#include <rtm/idl/BasicDataTypeSkel.h>
#include <rtm/idl/ExtendedDataTypesSkel.h>
#include <rtm/idl/InterfaceDataTypesSkel.h>
#include <rtm/RosOutPort.h>
#include "geometry_msgs/Twist.h"
using namespace RTC;
/*!
* @class JoyRTM2velROS
* @brief convert Joystick sample port to ROS twist msg
*
*/
class JoyRTM2velROS
: public RTC::DataFlowComponentBase
{
public:
/*!
* @brief constructor
* @param manager Maneger Object
*/
JoyRTM2velROS(RTC::Manager* manager);
/*!
* @brief destructor
*/
~JoyRTM2velROS();
/***
*
* The initialize action (on CREATED->ALIVE transition)
* formaer rtc_init_entry()
*
* @return RTC::ReturnCode_t
*
*
*/
virtual RTC::ReturnCode_t onInitialize();
/***
*
* The execution action that is invoked periodically
* former rtc_active_do()
*
* @param ec_id target ExecutionContext Id
*
* @return RTC::ReturnCode_t
*
*
*/
virtual RTC::ReturnCode_t onExecute(RTC::UniqueId ec_id);
protected:
// Configuration variable declaration
//
/*!
*
* - Name: max_linear_velocity
* - DefaultValue: 0.1
*/
double m_max_linear_velocity;
/*!
*
* - Name: max_angular_velocity
* - DefaultValue: 0.2
*/
double m_max_angular_velocity;
//
// DataInPort declaration
//
TimedFloatSeq m_joyInput;
/*!
*/
InPort m_joyInputIn;
// ROS Port
geometry_msgs::Twist m_rosVel;
RosOutPort m_rosVelOut;
private:
};
extern "C"
{
DLL_EXPORT void JoyRTM2velROSInit(RTC::Manager* manager);
};
#endif // JOYRTM2VELROS_H
実体(.cpp)
// -*- C++ -*-
/*!
* @file JoyRTM2velROS.cpp
* @brief convert Joystick sample port to ROS twist msg
* @date $Date$
*
* $Id$
*/
#include "JoyRTM2velROS.h"
// Module specification
// <rtc-template block="module_spec">
static const char* joyrtm2velros_spec[] =
{
"implementation_id", "JoyRTM2velROS",
"type_name", "JoyRTM2velROS",
"description", "convert Joystick sample port to ROS twist msg",
"version", "1.0.0",
"vendor", "OTL",
"category", "Sample",
"activity_type", "PERIODIC",
"kind", "DataFlowComponent",
"max_instance", "1",
"language", "C++",
"lang_type", "compile",
// Configuration variables
"conf.default.max_linear_velocity", "0.2",
"conf.default.max_angular_velocity", "0.4",
// Widget
"conf.__widget__.max_linear_velocity", "slider",
"conf.__widget__.max_angular_velocity", "slider",
// Constraints
""
};
// </rtc-template>
/*!
* @brief constructor
* @param manager Maneger Object
*/
JoyRTM2velROS::JoyRTM2velROS(RTC::Manager* manager)
// <rtc-template block="initializer">
: RTC::DataFlowComponentBase(manager),
m_joyInputIn("joy_input", m_joyInput)
// </rtc-template>
,
m_rosVelOut("cmd_vel", "rtm2ros", m_rosVel)
{
}
/*!
* @brief destructor
*/
JoyRTM2velROS::~JoyRTM2velROS()
{
}
RTC::ReturnCode_t JoyRTM2velROS::onInitialize()
{
// Registration: InPort/OutPort/Service
// <rtc-template block="registration">
// Set InPort buffers
addInPort("joy_input", m_joyInputIn);
// Set OutPort buffer
// Set service provider to Ports
// Set service consumers to Ports
// Set CORBA Service Ports
// </rtc-template>
// <rtc-template block="bind_config">
// Bind variables and configuration variable
bindParameter("max_linear_velocity", m_max_linear_velocity, "0.2");
bindParameter("max_angular_velocity", m_max_angular_velocity, "0.4");
// </rtc-template>
addRosOutPort("ros_velocity", m_rosVelOut);
return RTC::RTC_OK;
}
RTC::ReturnCode_t JoyRTM2velROS::onExecute(RTC::UniqueId ec_id)
{
if(m_joyInputIn.isNew()) {
m_joyInputIn.read();
m_rosVel.linear.x = m_joyInput.data[1] * 0.005;
m_rosVel.angular.z = -m_joyInput.data[0] * 0.010;
if ( m_max_linear_velocity < m_rosVel.linear.x) {
m_rosVel.linear.x = m_max_linear_velocity;
} else if (-m_max_linear_velocity > m_rosVel.linear.x) {
m_rosVel.linear.x = -m_max_linear_velocity;
} else if (fabs(m_rosVel.linear.x) < 0.01) {
m_rosVel.linear.x = 0.0;
}
if ( m_max_angular_velocity < m_rosVel.angular.z) {
m_rosVel.angular.z = m_max_angular_velocity;
} else if (-m_max_angular_velocity > m_rosVel.angular.z) {
m_rosVel.angular.z = -m_max_angular_velocity;
} else if (fabs(m_rosVel.angular.z) < 0.01) {
m_rosVel.angular.z = 0.0;
}
m_rosVelOut.write();
}
return RTC::RTC_OK;
}
extern "C"
{
void JoyRTM2velROSInit(RTC::Manager* manager)
{
coil::Properties profile(joyrtm2velros_spec);
manager->registerFactory(profile,
RTC::Create<JoyRTM2velROS>,
RTC::Delete<JoyRTM2velROS>);
}
};
OpenRTM-asit ROSパッチを試す(インストール編)
OpenRTMにROS通信を追加するパッチがあります。
これを使ってみます。
環境はUbuntu10.04、ROSはdiamondbackです。
かなり苦労しました。
http://www.openrtm.org/OpenRTM-aist/html/E3839EE3838BE383A5E382A2E383AB2Frosport.html
ソースからOpenRTM-aistをビルドする必要ああるのでソースをゲットします。
1.0.0です。
$ wget http://www.openrtm.org/pub/OpenRTM-aist/cxx/1.0.0/OpenRTM-aist-1.0.0-RELEASE.tar.bz2
パッチもゲット
$ wget http://www.openrtm.org/pub/OpenRTM-aist/cxx/1.0.0/ros_transport.patch-1.0.1.tar.gz
パッケージの展開
$ tar jxvf OpenRTM-aist-1.0.0-RELEASE.tar.bz2
$ tar zxvf ros_transport.patch-1.0.1.tar.gz
$ cd OpenRTM-aist-1.0.0

これを使ってみます。
環境はUbuntu10.04、ROSはdiamondbackです。
かなり苦労しました。
http://www.openrtm.org/OpenRTM-aist/html/E3839EE3838BE383A5E382A2E383AB2Frosport.html
ソースからOpenRTM-aistをビルドする必要ああるのでソースをゲットします。
1.0.0です。
$ wget http://www.openrtm.org/pub/OpenRTM-aist/cxx/1.0.0/OpenRTM-aist-1.0.0-RELEASE.tar.bz2
パッチもゲット
$ wget http://www.openrtm.org/pub/OpenRTM-aist/cxx/1.0.0/ros_transport.patch-1.0.1.tar.gz
aptでいれたOpenRTM-aistは削除しておきます。
$ sudo apt-get remove openrtm-aist-example openrtm-aist openrtm-aist-dev
パッケージの展開
$ tar jxvf OpenRTM-aist-1.0.0-RELEASE.tar.bz2
$ tar zxvf ros_transport.patch-1.0.1.tar.gz
$ cd OpenRTM-aist-1.0.0
パッチを当てます。
$ patch -p0 < ../ros_transport.patch
そしてautoconfができるようにlibtool.m4を現在使っているシステムのものと入れ替えます(ここ重要)
$ find . -name libtool.m4 -exec cp /usr/share/aclocal/libtool.m4 {} \;
さらにsrc/lib/rtm/Makefile.amの以下の変数を次のように書き換えます。(ここも重要)
(cturtleを使っている場合はこれなくても動くようです)
ros_cflags=`rospack export --lang=cpp --attrib=cflags roscpp`
ros_libs=`rospack export --lang=cpp --attrib=lflags roscpp`
そしたらautoreconfして、あとはお決まりの流れです。
$ autoreconf -ifv
$ ./configure
$ make
インストール
インストール
$ sudo make install
これで/usr/local/以下にインストールされます。
@hyaguchijskさんに協力をいただきました。ありがとうございました。
次にサンプルをmakeします。
$ wget http://www.openrtm.org/pub/OpenRTM-aist/cxx/1.0.0/examples.ros-1.0.0.tar.gz
$ tar zxvf examples.ros-1.0.0.tar.gz
$ cd examples.ros
$ cd publisher
$ make
$ cd ../subscriber
$ make
この状態でpublisherCompとsubscriberCompを動かしてActivateすると
それぞれPub/Subしてくれます。
やっと動いた・・・。

続OpenRTM-aist
引き続きOpenRTMのサンプルを試してみました。
移動ロボットを仮想ジョイパッドで動かすことができます。

やっぱりかなりハマりました。
でも↓のサイトにだいたい書いてあります。
非常に参考になりました。
http://code.google.com/p/rtm-ros-robotics/wiki/RTM_2DSimulator_Example
とくに
$ sudo apt-get install tix
とか、実はバグがあるとか、ハマりどころを押さえていますね。
公式ドキュメントもアップデートしていただきたい所です。
移動ロボットを仮想ジョイパッドで動かすことができます。
やっぱりかなりハマりました。
でも↓のサイトにだいたい書いてあります。
非常に参考になりました。
http://code.google.com/p/rtm-ros-robotics/wiki/RTM_2DSimulator_Example
とくに
$ sudo apt-get install tix
とか、実はバグがあるとか、ハマりどころを押さえていますね。
公式ドキュメントもアップデートしていただきたい所です。
2011年8月11日木曜日
OpenRTM-aistのインストール(自分用メモ)
日本で唯一OpenRTMではなくROS陣営と思われている(?)私ですが、
Electricがリリースされるまでネタがないので、
たまにはOpenRTMやってみようと思いました。
以下はメモ書きみたいなものです。
OpenRTMはまずこれやれ、っていうのがあったら教えてください。
ルンバをOpenRTMで動かせるか教えてください。
OpenRTM-aist 1.00(C++) on Ubuntu 10.04です。
http://www.openrtm.org/openrtm/ja/node/1001
に従いインストールしてみます。
OpenRTMはysugaさんが紹介していますね。
http://ysuga.net/robot/rtm
1.source.listの編集
/etc/apt/source.list.d/openrtm.list
に
deb http://www.openrtm.org/pub/Linux/ubuntu lucid main
2.1.C++版インストール
Electricがリリースされるまでネタがないので、
たまにはOpenRTMやってみようと思いました。
以下はメモ書きみたいなものです。
OpenRTMはまずこれやれ、っていうのがあったら教えてください。
ルンバをOpenRTMで動かせるか教えてください。
OpenRTM-aist 1.00(C++) on Ubuntu 10.04です。
http://www.openrtm.org/openrtm/ja/node/1001
に従いインストールしてみます。
OpenRTMはysugaさんが紹介していますね。
http://ysuga.net/robot/rtm
1.source.listの編集
/etc/apt/source.list.d/openrtm.list
に
deb http://www.openrtm.org/pub/Linux/ubuntu lucid main
を追加。
2.インストール
2.1.C++版インストール
以下のようにしてみました。成功したけど、これで動くかな。
$ sudo apt-get update
$ sudo apt-get install gcc g++ make uuid-dev$ sudo apt-get install libomniorb4-dev omniidl4 ominiorb4-nameserver$ sudo apt-get install openrtm-aist openrtm-aist-doc openrtm-aist-dev openrtm-aist-example
(公式どおりやると以下のようにエラーがでました。$ apt-get install libomniorb4 libomniorb4-dev omniidl4 omniorb4-nameserverパッケージリストを読み込んでいます... 完了依存関係ツリーを作成しています状態情報を読み取っています... 完了E: パッケージ libomniorb4 が見つかりません)2.2.Python版インストールPython版もいれてしまいましょう。2.3.Eclipseとツールのインストール全部入りをダウンロードします。$ tar zxvf eclipse342_rtmtools100release_linux_ja.tar.gz$ cd eclipse$ ./eclipseで起動。3.動作確認次に何やればいいかわからなかったけどぐぐったらでました。
http://openrtm.org/openrtm/ja/content/%E5%8B%95%E4%BD%9C%E7%A2%BA%E8%AA%8D-linux%E7%B7%A83.1.ネームサーバの起動$ rtm-naming3.2 コンフィグ作成$ mkdir ~/RTCwork$ cd ~/RTCworkして、以下の内容でrtc.confを作成.最初のnameserversのところはlocalhostでは動きませんでした。ipv6のせいだそうです。3.3。サンプル実行
以下のようにしてインストールされているサンプルを実行インプット側。$ cd ~/RTCwork$ /usr/share/OpenRTM-aist/examples/ConsoleInComp -f rtc.conf
アウトプット側。
$ cd ~/RTCwork
$ cd ~/RTCwork
$ /usr/share/OpenRTM-aist/examples/ConsoleOutComp -f rtc.conf
(公式はexampsになっているので注意。)
また、必ずcd ~/RTCworkしてください。
あとはEclipseのSystemEditorから接続すればOK!
できたーーー!!

最後めっちゃ端折りましたが、SystemEditorが全く動かなくて困りました。
が、実はrtc.confにlocalhostと書いていたのが原因でした。
うーん疲れた。
あとはEclipseのSystemEditorから接続すればOK!
できたーーー!!

最後めっちゃ端折りましたが、SystemEditorが全く動かなくて困りました。
が、実はrtc.confにlocalhostと書いていたのが原因でした。
うーん疲れた。
登録:
投稿 (Atom)