ROS勉強記録
趣味でROSというロボット用ミドルウェア(Robot Operating System)を勉強した記録です。ROSを使ってロボットに知能を吹き込みます。
2011年8月16日火曜日
続OpenRTM-aist
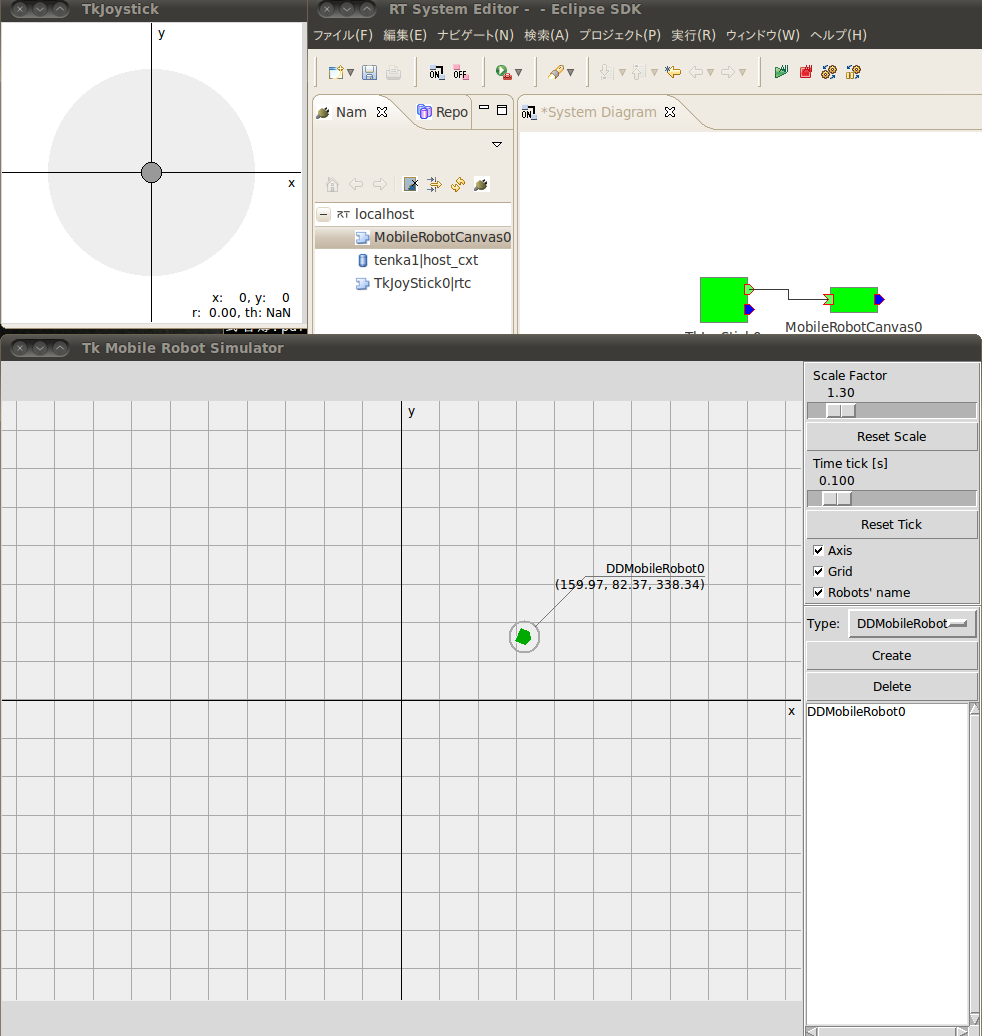
引き続きOpenRTMのサンプルを試してみました。
移動ロボットを仮想ジョイパッドで動かすことができます。
やっぱりかなりハマりました。
でも↓のサイトにだいたい書いてあります。
非常に参考になりました。
http://code.google.com/p/rtm-ros-robotics/wiki/RTM_2DSimulator_Example
とくに
$ sudo apt-get install tix
とか、実はバグがあるとか、ハマりどころを押さえていますね。
公式ドキュメントもアップデートしていただきたい所です。
0 件のコメント:
コメントを投稿
次の投稿
前の投稿
ホーム
登録:
コメントの投稿 (Atom)
0 件のコメント:
コメントを投稿