URDFのビューワーの urdf-viz のバイナリリリースをはじめました。
Linux(たぶんなんでも動く)/MacOS/Windows用の3つがあります。さすがに64bit版だけです。
↓からダウンロード出来ます。
https://github.com/OTL/urdf-viz/releases
Windowsだとurdfファイルをurdf-viz.exeのアイコンにドラッグ・アンド・ドロップでURDF可視化できちゃう(rospackとかPATH通っていれば。もしくはmeshファイルのPathがurdfからの相対で書かれている場合は)ので本当に楽でいいです。(っていうかwindowsでrospack動くのか?)
前回は手動でリリースしたんですが、いい加減めんどくさいので自動化しました。
↓を参考に、というかこれを利用して環境を作りました。
https://github.com/japaric/trust
Linux/MacOS用にはおなじみのtravis-ciを使って、Windows用のCIには Appveryor を使いました。
タグをpushするとgithubのreleaseを自動で作ってくれて、そこにバイナリを配置してくれるようになっています。
githubのdeploy用のキーをさらに暗号化して 設定することでこういうことが出来るようです。
2017年11月6日月曜日
2017年8月21日月曜日
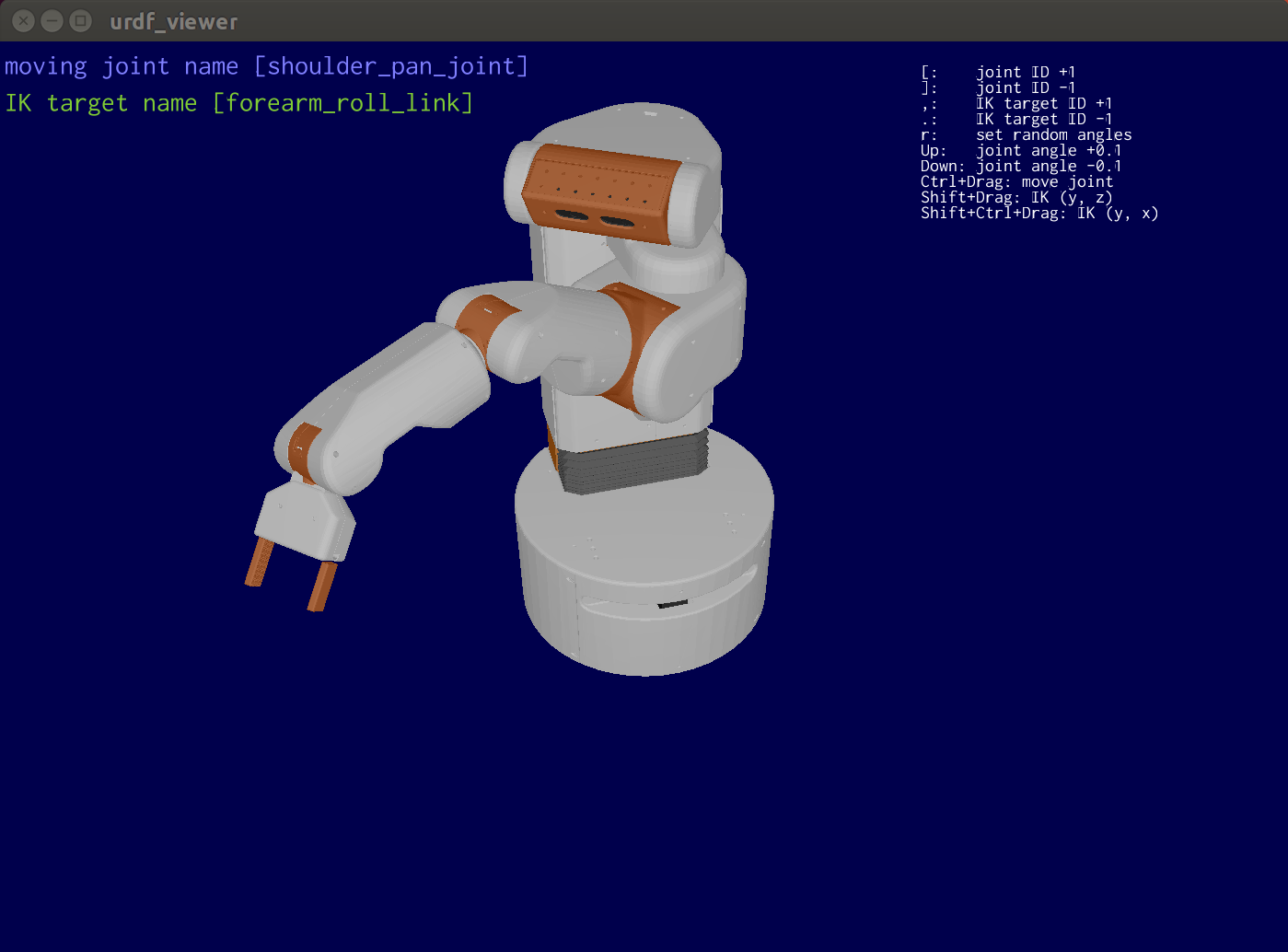
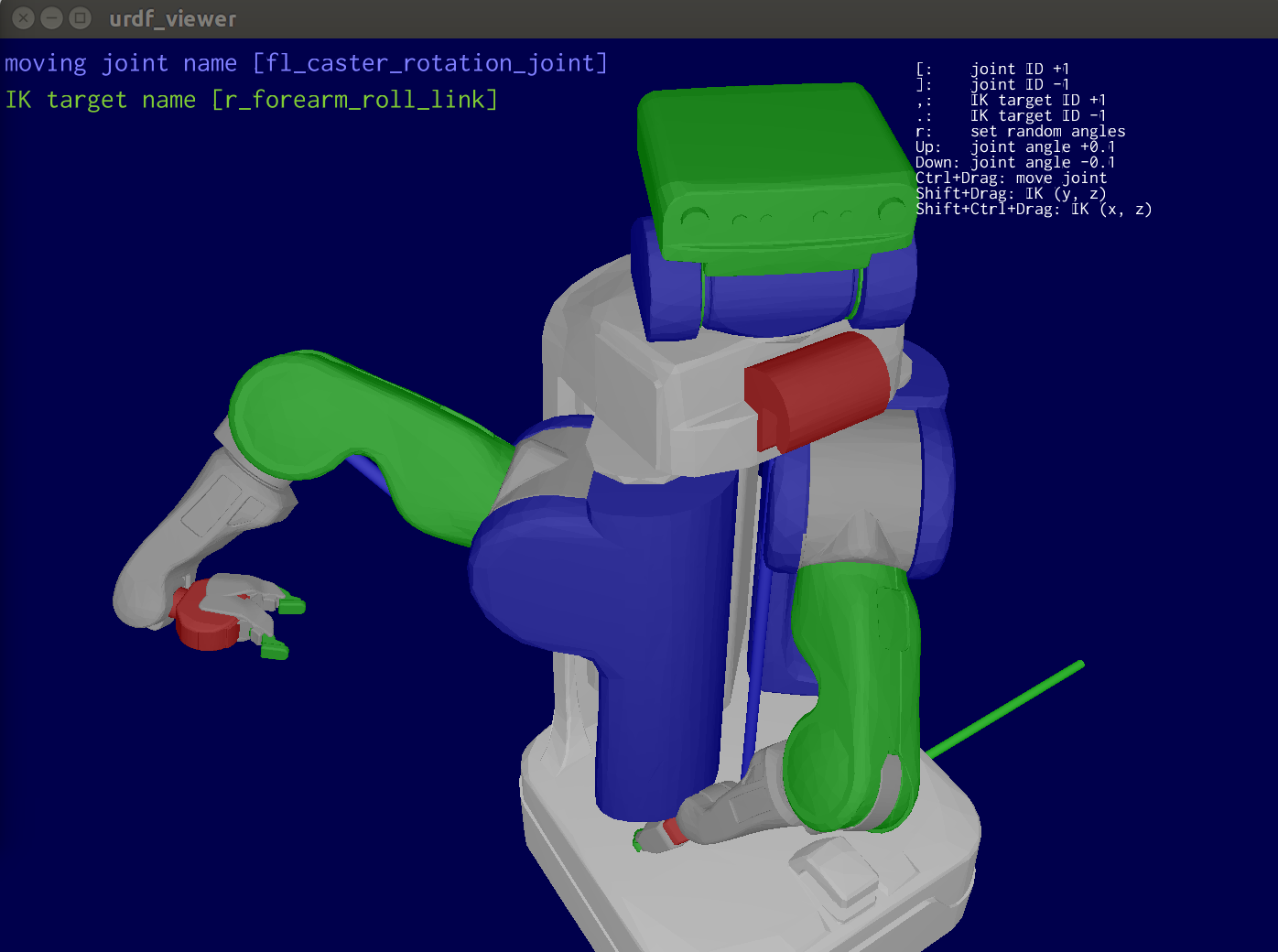
Rustで書かれたURDF Viewer: urdf-viz
今やロボットに最も適した言語として有名になりつつあるRustでURDFを可視化するツールを作りました。
http://github.com/OTL/urdf-viz
ぶっちゃけRustを勉強するために作り始めたのですが、やっと実用的な状態になったのでアナウンスしました。

http://github.com/OTL/urdf-viz
ぶっちゃけRustを勉強するために作り始めたのですが、やっと実用的な状態になったのでアナウンスしました。
Rustにはすでに
などのライブラリがあったので、
あたりを自分で作りました。
特徴的な機能として以下があります。
- Rustなのでシングルバイナリで動く
- 関節角度Limitを考慮して関節を動かせる
- 逆運動学(ヤコビアン)で手先を動かせる
Ubuntu16.04 64bitを使っている人は↓からダウンロードできます。
Rust使っている人は
$ cargo install urdf-viz
でインストールできます。
使い勝手は正直かなり悪いですが、やりたいことはなんとかできるのではないでしょうか?
フィードバックお待ちしております。
今回これを作ってみて、URDFフォーマットに少し詳しくなりました。
登録:
投稿 (Atom)