作ったのはgmappingなどで有名なフライブルグ大学です。
色付きの3次元マップができるはずです。
まずはROSはdiamondbackのバージョンを利用していることを確かめましょう。
$ echo $ROS_ROOT
/opt/ros/diamondback/rosになっているでしょうか?
なっていなければdiamondbackをインストールしましょう。
http://www.ros.org/wiki/diamondback/Installation/Ubuntu
↓などを参考にしてもよいです。
http://ros-robot.blogspot.com/2011/03/diamondback.html
で、次に必要なパッケージをaptでインストールします。
$ sudo apt-get update
$ sudo apt-get install ros-diamondback-desktop-full ros-diamondback-perception-pcl-addons ros-diamondback-openni-kinect meshlab~/rosにROS_PACKAGE_PATHが通っているなら、以下のようにします。
$ cd ros
$ svn co http://alufr-ros-pkg.googlecode.com/svn/trunk/freiburg_tools/hogman_minimal
$ svn co https://svn.openslam.org/data/svn/rgbdslam/trunk rgbdslam
$ roscd rgbdslam && rosmake --rosdep-install rgbdslamam途中httpsの証明書の警告がでますが、気にせずpでインストールしました。
perception_pclとかを個別にインストールしていた人は削除してdiamondbackのものを使いましょう。
ちなみに以下も必要ですね。
$ sudo apt-get install libgsl0-dev
ところで最初にインストールしたmeshlabってよさそうですね。ライセンスはGPL。
http://meshlab.sourceforge.net
ポイントクラウドからメッシュ作ったりできるみたいです。
ポリゴンリダクションはできないのかな。
では実行しましょう。Kinectを差して、
$ roslaunch openni_camera openni_node.launch
$ roslaunch rgbdslam rgbdslam.launchすると以下のような画面がでますので、スペースでスタートです。

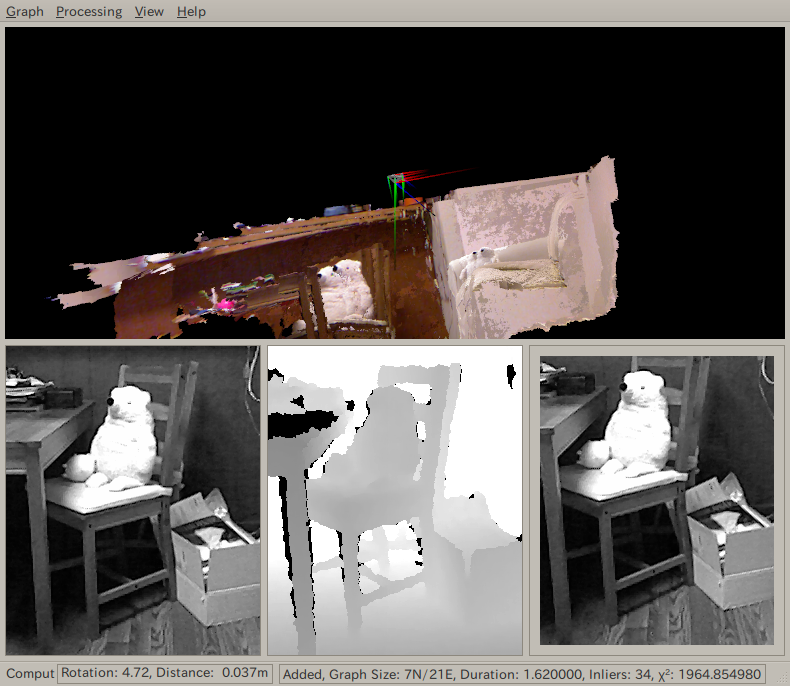
熊ちゃんがちょっとダブっちゃってます。
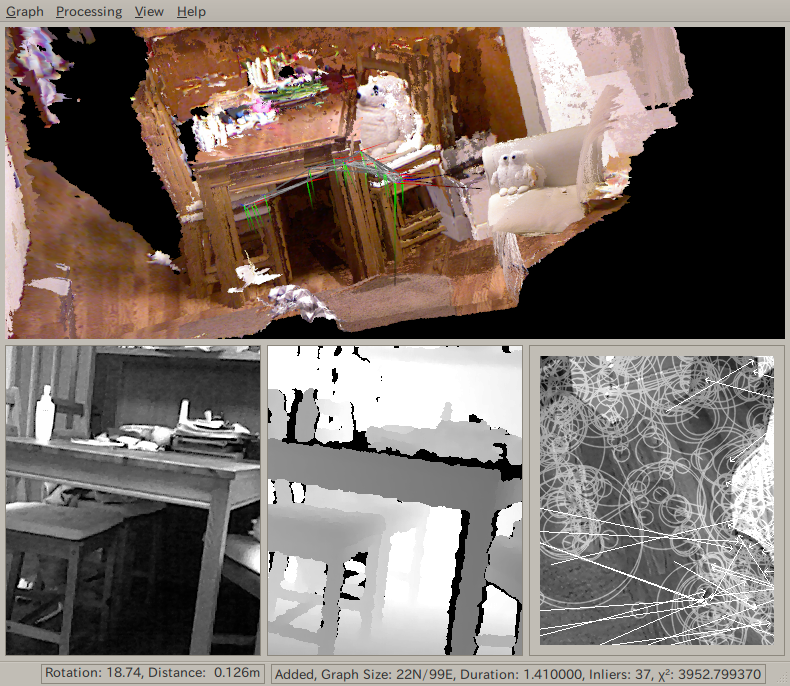
またスペースを押すと終了です。
Graph->Send Modelするとrvizにできたモデルが表示されます。
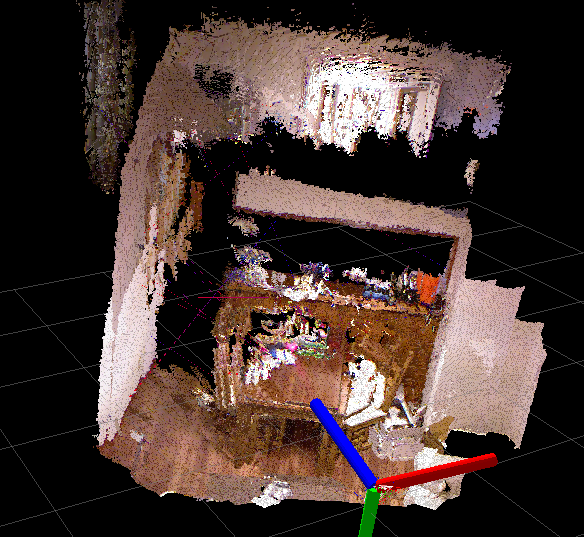
机の足などがダブってしまいました。
もっとゆっくりKinectを動かせばちゃんとできるのかもしれません。
もしくは、もっと早いPC環境ではもっとちゃんとできるかな。
0 件のコメント:
コメントを投稿