クラスタリングです。
画像処理でもラベリングは結構使うと思います。
それの3D版です。
Euclidean Cluster Extraction
http://pointclouds.org/documentation/tutorials/cluster_extraction.php#cluster-extraction
こちらのチュートリアルのほうがシンプルですが、私は可視化したかったので↓のように少し改造してビューワを付けました。
$ wget http://dev.pointclouds.org/attachments/download/157/table_scene_lms400.pcd
して、以下をcluster_extraction.cppとして保存です。
#include <pcl/ModelCoefficients.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/features/normal_3d.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/kdtree/kdtree.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/segmentation/extract_clusters.h>
#include <pcl/visualization/cloud_viewer.h>
int
main (int argc, char** argv)
{
// Read in the cloud data
pcl::PCDReader reader;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
reader.read ("table_scene_lms400.pcd", *cloud);
std::cout << "PointCloud before filtering has: " << cloud->points.size () << " data points." << std::endl; //*
// Create the filtering object: downsample the dataset using a leaf size of 1cm
pcl::VoxelGrid<pcl::PointXYZ> vg;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
vg.setInputCloud (cloud);
vg.setLeafSize (0.01, 0.01, 0.01);
vg.filter (*cloud_filtered);
std::cout << "PointCloud after filtering has: " << cloud_filtered->points.size () << " data points." << std::endl; //*
// Create the segmentation object for the planar model and set all the parameters
pcl::SACSegmentation<pcl::PointXYZ> seg;
pcl::PointIndices::Ptr inliers (new pcl::PointIndices);
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_plane (new pcl::PointCloud<pcl::PointXYZ> ());
pcl::PCDWriter writer;
seg.setOptimizeCoefficients (true);
seg.setModelType (pcl::SACMODEL_PLANE);
seg.setMethodType (pcl::SAC_RANSAC);
seg.setMaxIterations (100);
seg.setDistanceThreshold (0.02);
int i=0, nr_points = cloud_filtered->points.size ();
while (cloud_filtered->points.size () > 0.3 * nr_points)
{
// Segment the largest planar component from the remaining cloud
seg.setInputCloud(cloud_filtered);
seg.segment (*inliers, *coefficients); //*
if (inliers->indices.size () == 0)
{
std::cout << "Could not estimate a planar model for the given dataset." << std::endl;
break;
}
// Extract the planar inliers from the input cloud
pcl::ExtractIndices<pcl::PointXYZ> extract;
extract.setInputCloud (cloud_filtered);
extract.setIndices (inliers);
extract.setNegative (false);
// Write the planar inliers to disk
extract.filter (*cloud_plane); //*
std::cout << "PointCloud representing the planar component: " << cloud_plane->points.size () << " data points." << std::endl;
// Remove the planar inliers, extract the rest
extract.setNegative (true);
extract.filter (*cloud_filtered); //*
}
// Creating the KdTree object for the search method of the extraction
pcl::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::KdTreeFLANN<pcl::PointXYZ>);
tree->setInputCloud (cloud_filtered);
std::vector<pcl::PointIndices> cluster_indices;
pcl::EuclideanClusterExtraction<pcl::PointXYZ> ec;
ec.setClusterTolerance (0.02); // 2cm
ec.setMinClusterSize (100);
ec.setMaxClusterSize (25000);
ec.setSearchMethod (tree);
ec.setInputCloud( cloud_filtered);
ec.extract (cluster_indices);
int j = 0;
float colors[6][3] ={{255, 0, 0}, {0,255,0}, {0,0,255}, {255,255,0}, {0,255,255}, {255,0,255}};
pcl::visualization::CloudViewer viewer("cluster viewer");
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_cluster(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::copyPointCloud(*cloud_filtered, *cloud_cluster);
for (std::vector<pcl::PointIndices>::const_iterator it = cluster_indices.begin (); it != cluster_indices.end (); ++it)
{
for (std::vector<int>::const_iterator pit = it->indices.begin (); pit != it->indices.end (); pit++) {
cloud_cluster->points[*pit].r = colors[j%6][0];
cloud_cluster->points[*pit].g = colors[j%6][1];
cloud_cluster->points[*pit].b = colors[j%6][2];
}
std::cout << "PointCloud representing the Cluster: " << cloud_cluster->points.size () << " data points." << std::endl;
std::stringstream ss;
ss << "cloud_cluster_" << j << ".pcd";
writer.write<pcl::PointXYZRGB> (ss.str (), *cloud_cluster, false); //*
j++;
}
viewer.showCloud (cloud_cluster);
while (!viewer.wasStopped())
{
sleep (1);
}
return (0);
}
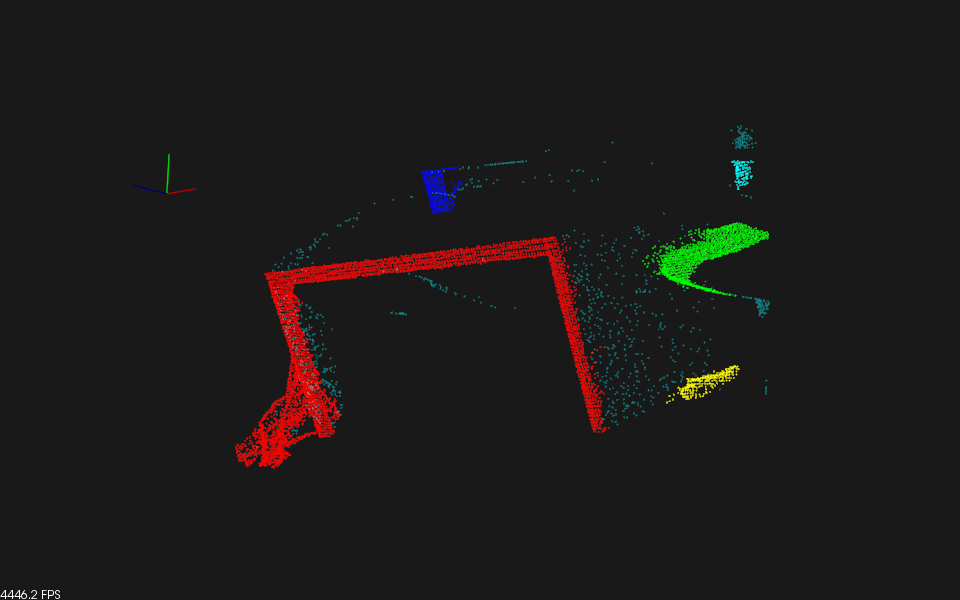
するとこんな感じです。
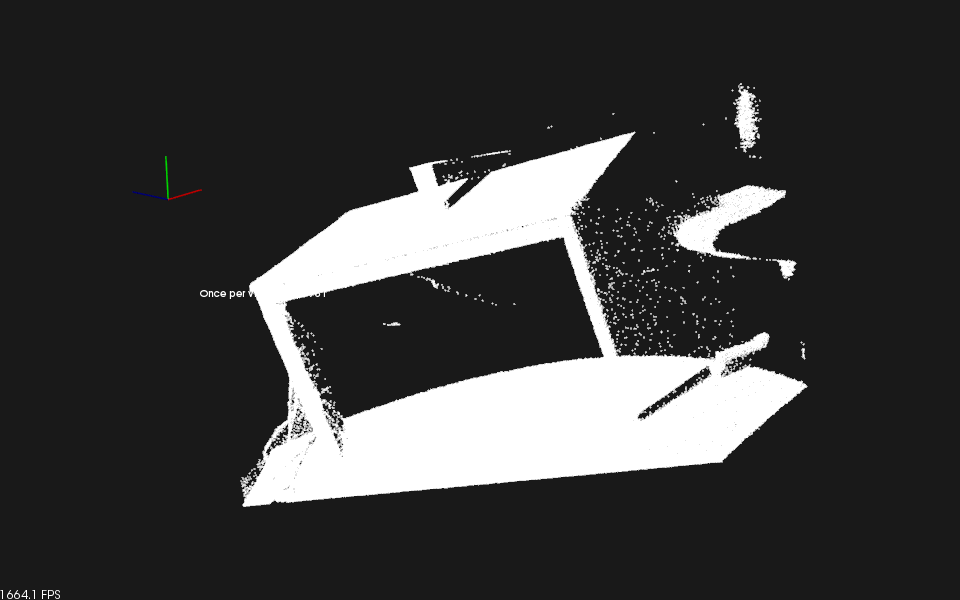
ちなみに元データはこんな感じ。テーブル上面と床が削除されています。
少しだけコードを読むと、
最初にポイントクラウドをファイルから読み込み、pcl::VexelGridを使ってダウンサンプリングしています。
ダウンサンプリングのチュートリアルもありますが簡単なので飛ばしました。
setLeafSizeで10mm刻みのグリッドでサンプリングしていますね。
次に前回やった平面検出で平面を削除しています。
複数の平面検出をどうやるのかと思ったら、検出した領域を削除して、削除したもに対してもう一度検出することでやっているみたいです。
while(...)のところです。
で、今回のキモはpcl::KdTreeを使ってEuclideanClusterEtractionしているところです。
setClusterToleranceでマージする最大距離を指定して、最小、最大のパーティクル数を指定しているようです。
CMakeListx.txtはいつもと同じです。
ここまでで、机の上にある物体をラベリングして認識することができるようになりました。
あとはフィルタのチュートリアルでもやればひと通り終わりかな?
大体感じはつかめたのでPCL本体はこれくらいにしておきましょう。
これで少しは面白いことができるかもしれません。
次はROSとのからみを見てみます。
0 件のコメント:
コメントを投稿