さっそくcturtleのPR2のシミュレーションを試してみます。
$ roslaunch pr2_gazebo pr2_empty_world.launch
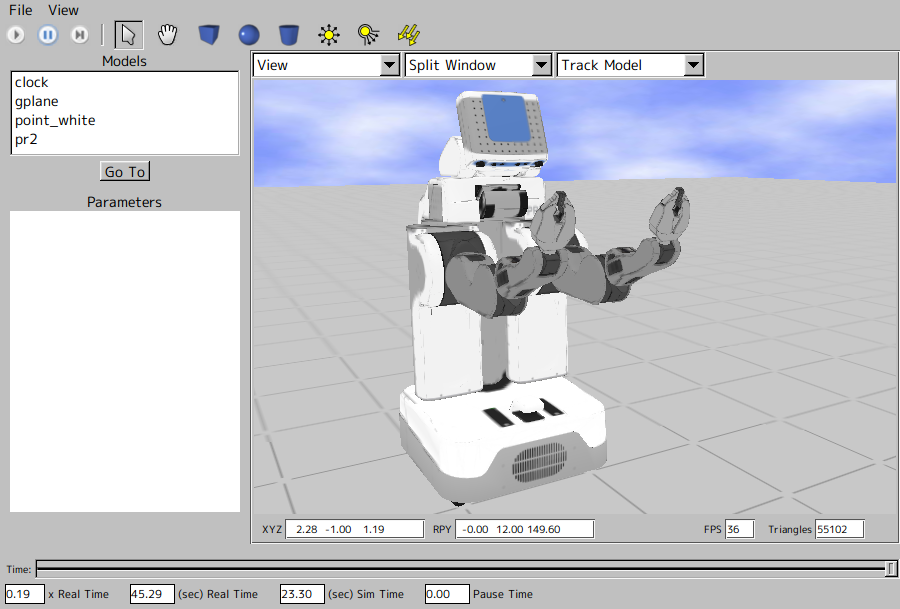
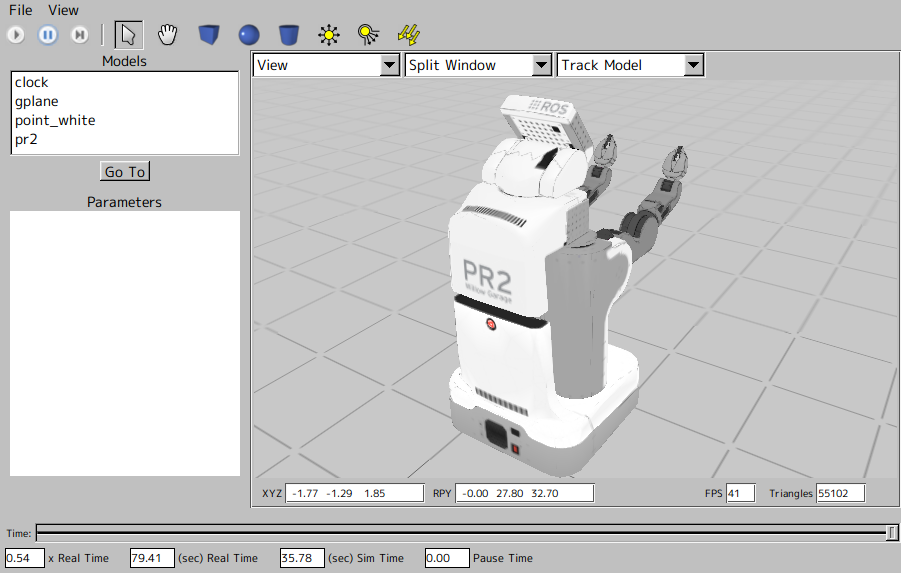
おー、テクスチャが張られて、色も実物っぽいです。
かっちょいい!
見た目重要ですね。
$ rosrun image_view image_view image:=/narrow_stereo_textured/left/image_color
などとするとカメラ画像も取れていることが分かります。

では、新機能を使って、遊んでみます。
まず、BOXを手先にぶつけてみます。

あれ?
衝突しないですね。
BOX以外のシリンダ、球ではちゃんと衝突しました。
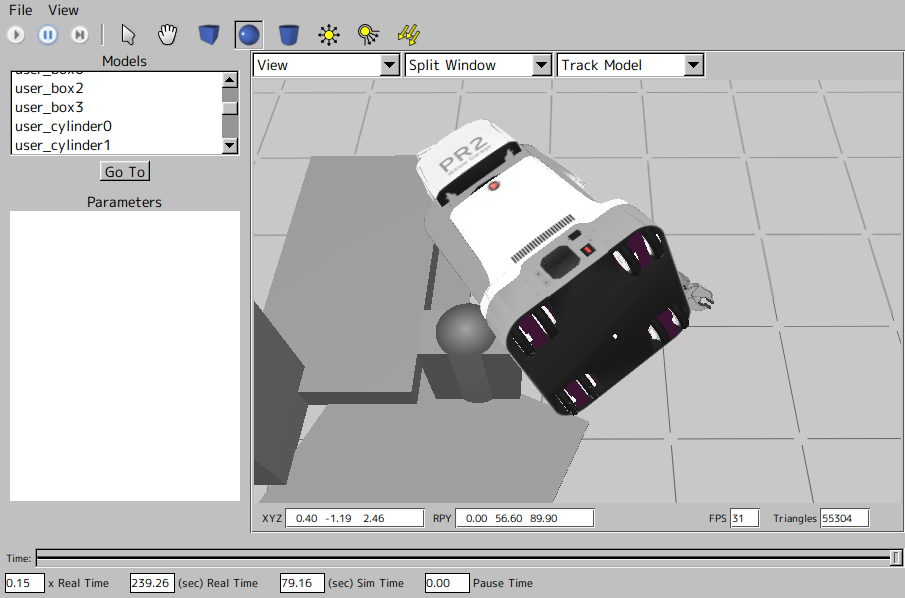
↓あられもないPR2の姿。
パラメータを見る限りシリンダもBOXも同じ設定なので、衝突しないのはバグでしょうか?
ちょっと分かりません。
0 件のコメント:
コメントを投稿