今日はEusLispを試してみたので、どんな感じかデモを紹介します。
(環境はUbuntu 10.04です。(OSX上のVirtualBox内の、です))
EusLispっていうのは産総研(当時は電総研)で作られたロボット用言語です。
日本で唯一PR2がある東大のJSK (情報システム工学研究室: Jouhou System Kougaku)が使っている言語で、ROSに対応(roseus)しています。
以前からもEusLispは入手可能でしたが、インストールが取っ付きにくく、なかなか一般の人に知られることは少なかったです。
また、EusLispは「戦争には使ってはいけない」という特殊なライセンスだったのですが、ROSのブログによるとBSDライセンスになったそうで、もっと自由に使うことができそうです。(EusLispのページなどにはライセンスについて記述がない?(古いライセンスのまま?)ライセンスについて分かる人教えてください。)
1)インストール
以下のページを参考にインストールします。
非常に簡単です。
http://sourceforge.net/apps/mediawiki/jskeus/index.php?title=Main_Page
~/src以下にインストールするとすると、
$ sudo apt-get install subversion gcc g++ libjpeg62-dev libxext-dev libx11-dev libgl1-mesa-dev libglu1-mesa-dev libpq-dev libpng12-dev
$ cd ~/src
$ svn co -N https://jskeus.svn.sourceforge.net/svnroot/jskeus/trunk jskeus
$ cd jskeus
$ make
そして、.bashrcに、
source ~/src/jskeus/bashrc.eus
を追加します。
以上でインストールは完了です。
2)デモ
$ cd ~/src/jskeus/irteus
$ irteusgl demo.l
としてインタプリタを起動します。
$ (test1)
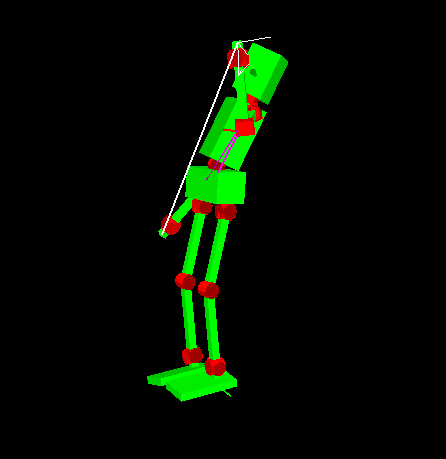
とすると、ヒューマノイドモデルが表示され、手先をのばしていくアニメーションが表示されます。足を固定して全身のIKをときながら顔を手先に向けるモーションです。
インタプリタ上でリターンを押すと止まります。
$ (test2)
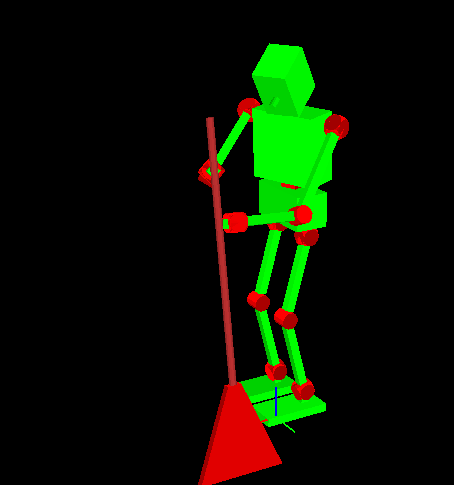
これもリターンで終了します。
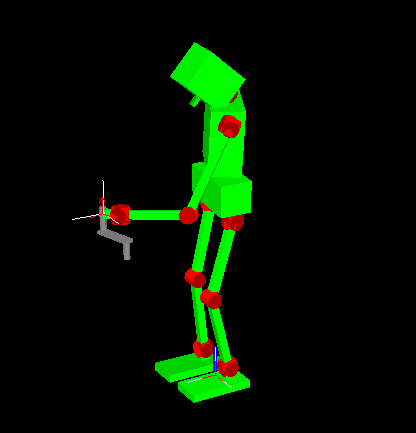
$ (test3)
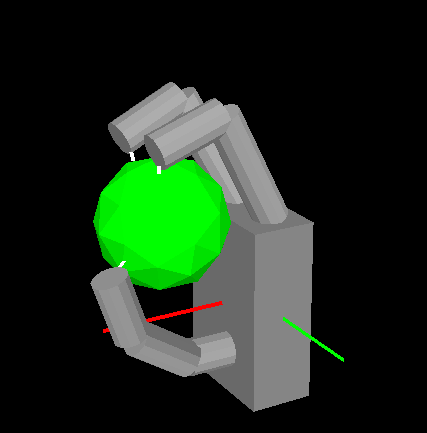
$ (test4)
全身で重心位置を制御しながらクランクまわしです。
サンプルもかなり面白いですね。個人的にはOpenRAVEより楽しそうに感じました。
結構これだけでもいろいろできそうですね。
ドキュメント/コメントが致命的になさ過ぎなのが残念です。
0 件のコメント:
コメントを投稿